模型(伪)量化
之前做了一个合并BatchNorm和Conv的试验:
Captain Jack:PyTorch 卷积与BatchNorm的融合所以,量化自然就是下一步工作。
主要的参考
简单低劣的量化
这里应该算是linear的量化,zero_point找的比较粗暴,肯定有更加优雅的。
局限:
- 伪量化,我只是首先量化为0-255(8bits的话),然后再重建到float(这里精度因为量化操作,丢失了一部分),再进行测试。
- 没有量化activation这块,也算不上完整的量化。下一步就弄,这个需要跑sample、统计数据后弄,逻辑相对比较复杂。
- BatchNorm没有量化。
下一步:
- Activation的量化,这个可能还涉及Resnet里面shortcut的连接问题。
- 看看可不可以弄一个Quantization Aware Training出来玩玩。
具体测试结果
(基于ImageNet的验证集合,用的torchvision的官方模型,50K的图片),不管实现是不是准确,反正符合趋势……
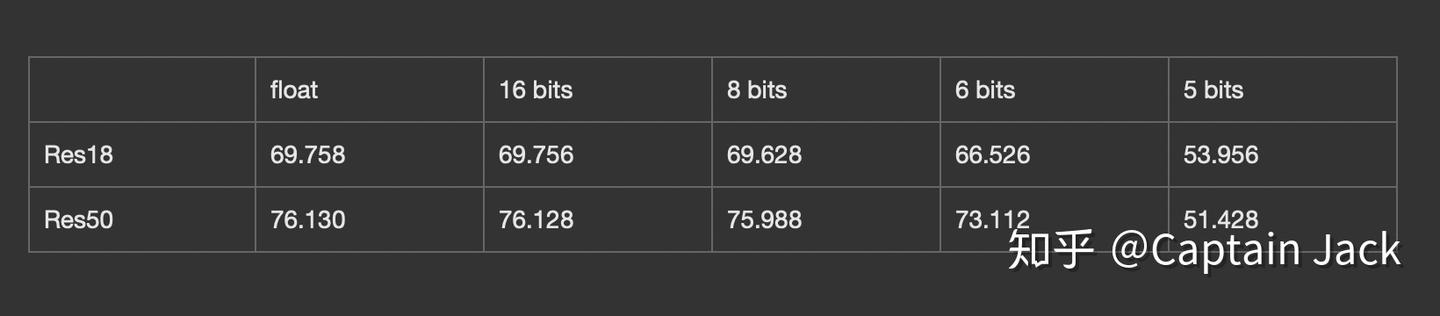
4bit的时候基本就是0了……感觉是不是因为我的实现太粗暴……
还是self-contained的代码(准确率测试拷贝了example代码库的代码),反正是不敢保证没有问题:
import torchvision as tv
import torchvision.transforms as transforms
import torchvision.datasets as datasets
import time
import torch
import torch.nn as nn
from pathlib import Path
def weight_quantize_parameter(weight, bits=8):
max_w = weight.max().item()
min_w = weight.min().item()
level = 2 ** bits - 1
scale = (max_w - min_w) / level
zero_point = round((0.0 - min_w) / scale)
return scale, zero_point
def quantize(weight, S, Z, bits=8):
return torch.clamp((weight / S).round() + Z, 0, 2 ** bits - 1)
def unquantize(weight, S, Z):
return S * (weight - Z)
def quantize_net(net, bits=8):
for n, module in net.named_modules():
if isinstance(module, torch.nn.Conv2d) or isinstance(module, torch.nn.Linear):
s, z = weight_quantize_parameter(module.weight, bits)
module.weight = torch.nn.Parameter(unquantize(quantize(module.weight, s, z, bits), s, z))
if module.bias is not None:
s, z = weight_quantize_parameter(module.bias, bits)
module.bias = torch.nn.Parameter(unquantize(quantize(module.bias, s, z, bits), s, z))
def test_net():
model = tv.models.resnet50(True)
model.eval()
p = torch.randn([1, 3, 224, 224])
original = model(p)
quantize_net(model)
q_output = model(p)
print(original.argmax())
print(q_output.argmax())
abs_diff = (original - q_output).abs()
print("Max abs diff: ", abs_diff.max().item())
print("Mean abs diff: ", abs_diff.mean().item())
print("MSE diff: ", torch.nn.MSELoss()(original, q_output).item())
class AverageMeter(object):
"""Computes and stores the average and current value"""
def __init__(self):
self.reset()
def reset(self):
self.val = 0
self.avg = 0
self.sum = 0
self.count = 0
def update(self, val, n=1):
self.val = val
self.sum += val * n
self.count += n
self.avg = self.sum / self.count
def accuracy(output, target, topk=(1,)):
"""Computes the accuracy over the k top predictions for the specified values of k"""
with torch.no_grad():
maxk = max(topk)
batch_size = target.size(0)
_, pred = output.topk(maxk, 1, True, True)
pred = pred.t()
correct = pred.eq(target.view(1, -1).expand_as(pred))
res = []
for k in topk:
correct_k = correct[:k].view(-1).float().sum(0, keepdim=True)
res.append(correct_k.mul_(100.0 / batch_size))
return res
def validate(val_loader, model, criterion):
batch_time = AverageMeter()
losses = AverageMeter()
top1 = AverageMeter()
top5 = AverageMeter()
# switch to evaluate mode
model.eval()
with torch.no_grad():
end = time.time()
for i, (input, target) in enumerate(val_loader):
input = input.cuda(non_blocking=True)
target = target.cuda(non_blocking=True)
# compute output
output = model(input)
loss = criterion(output, target)
# measure accuracy and record loss
acc1, acc5 = accuracy(output, target, topk=(1, 5))
losses.update(loss.item(), input.size(0))
top1.update(acc1[0], input.size(0))
top5.update(acc5[0], input.size(0))
# measure elapsed time
batch_time.update(time.time() - end)
end = time.time()
if i % 10 == 0:
print('Test: [{0}/{1}]\t'
'Time {batch_time.val:.3f} ({batch_time.avg:.3f})\t'
'Loss {loss.val:.4f} ({loss.avg:.4f})\t'
'Acc@1 {top1.val:.3f} ({top1.avg:.3f})\t'
'Acc@5 {top5.val:.3f} ({top5.avg:.3f})'.format(
i, len(val_loader), batch_time=batch_time, loss=losses,
top1=top1, top5=top5))
print(' * Acc@1 {top1.avg:.3f} Acc@5 {top5.avg:.3f}'
.format(top1=top1, top5=top5))
return top1.avg
def accuracy_model(model):
model.eval()
model.cuda()
val_dir = str(Path.home()) + "/ILSVRC2012_img_val"
normalize = transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
val_loader = torch.utils.data.DataLoader(
datasets.ImageFolder(val_dir,
transforms.Compose([
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
normalize,
])),
batch_size=256,
shuffle=False,
num_workers=16,
pin_memory=True)
criterion = nn.CrossEntropyLoss().cuda()
return validate(val_loader, model, criterion)
def test_accuracy():
model = tv.models.resnet50(True)
# top1 = accuracy_model(model)
model = tv.models.resnet50(True)
quantize_net(model, bits=8)
q_top1 = accuracy_model(model)
print(q_top1)
def test_layer():
model = tv.models.resnet50(True)
conv = model.conv1
p = torch.randn([1, 3, 112, 112])
original = conv(p)
# print(conv.state_dict()['weight'])
S, Z = weight_quantize_parameter(model.conv1.weight)
qw = unquantize(quantize(model.conv1.weight, S, Z), S, Z)
conv.weight = torch.nn.Parameter(qw)
q_output = conv(p)
# print(conv.state_dict()['weight'])
abs_diff = (original - q_output).abs()
print("Max abs diff: ", abs_diff.max().item())
print("Mean abs diff: ", abs_diff.mean().item())
print("MSE diff: ", torch.nn.MSELoss()(original, q_output).item())
# print(q_output, original)
if __name__ == "__main__":
test_accuracy()