K.I.S.S
home
topics
about
RSS
多相机融合的感知模型玩具
Link:
水个 KPI,上周花一天时间做的一个 POC 玩具。
传感器
4 摄像头(侧面鱼眼 x2, 前后广角 x2)
低线束 Lidar x N(仅标注用途,未输入)
无硬同步
相机系统无标定
标注
点云分割的稀疏标注,鸟瞰图视角
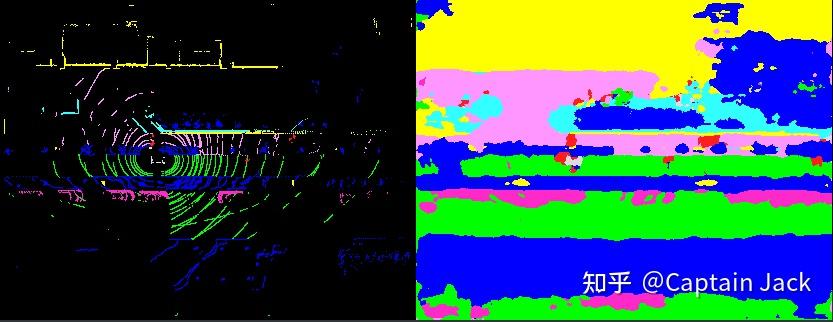
训练结果
基本达到预期,细节上的东西可以后续模型结构、特征融合等等慢慢优化。
具备融合能力
具备空间距离的感知能力
相比点云更加稠密的预测结果
具备多视角补盲能力