[Notes] Tesla AI Day - Vision篇
Tesla AI day 当天看了直播(感谢 hacknews 上有人贴了链接让我看见了),然而这次的内容信息密度实在太大了,而且基本算是全技术栈的能力展示。只能慢慢消化,先看看和自己相关的感知。
相比之前的 workshop 的内容,这次涉及的范围更广,内容深度也稍深:
Captain Jack:[Notes] Tesla CVPR2021 Workshop
先吹一波:
Tesla 本身自己搞这块才3、4年时间,做出这个成就,惊为天人。简直是成功的弯道超车典范,或许 Musk 喜欢的第一原则的思考方式对这方面有很大的助益。依靠 trick or 某一项技术妄想弯道超车本身就不是踏实的路线,想弯道超车还是要从战略思路和技术路线层面上来实现,我本人对 Tesla 是真的佩服。

1 输入输入
- 1280x960 12 bits(HDR) @ 36Hz,RAW
- 输入使用了比较低像素的相机。
- 使用12bits HDR,应该是用来解决相机曝光问题。
- 使用RAW结果,减少马赛克算法等等的预处理,理论上提供更多的信息量。
尽量用 RAW 数据,也是我自己的观点:可以减少曝光动态范围大带来的信息丢失问题。这个观点其实但凡自己有个相机也知道,搞 CV 的手头有个可换镜头的相机都是标配,不啰嗦了。
2 网络结构(HydraNet)
我的观点还是一样:如今,网络结构不是解决问题的关键,后面这些东西你随便换,一样能做到一个不错的结果。
- Backbone: RegNet,目前主流最好的backbone
good tradeoff of latency and accuracy
- Neck: BiFPN,多尺度的传统做法
- Heads: HydraNet Detection:
one-stage, yolo-like
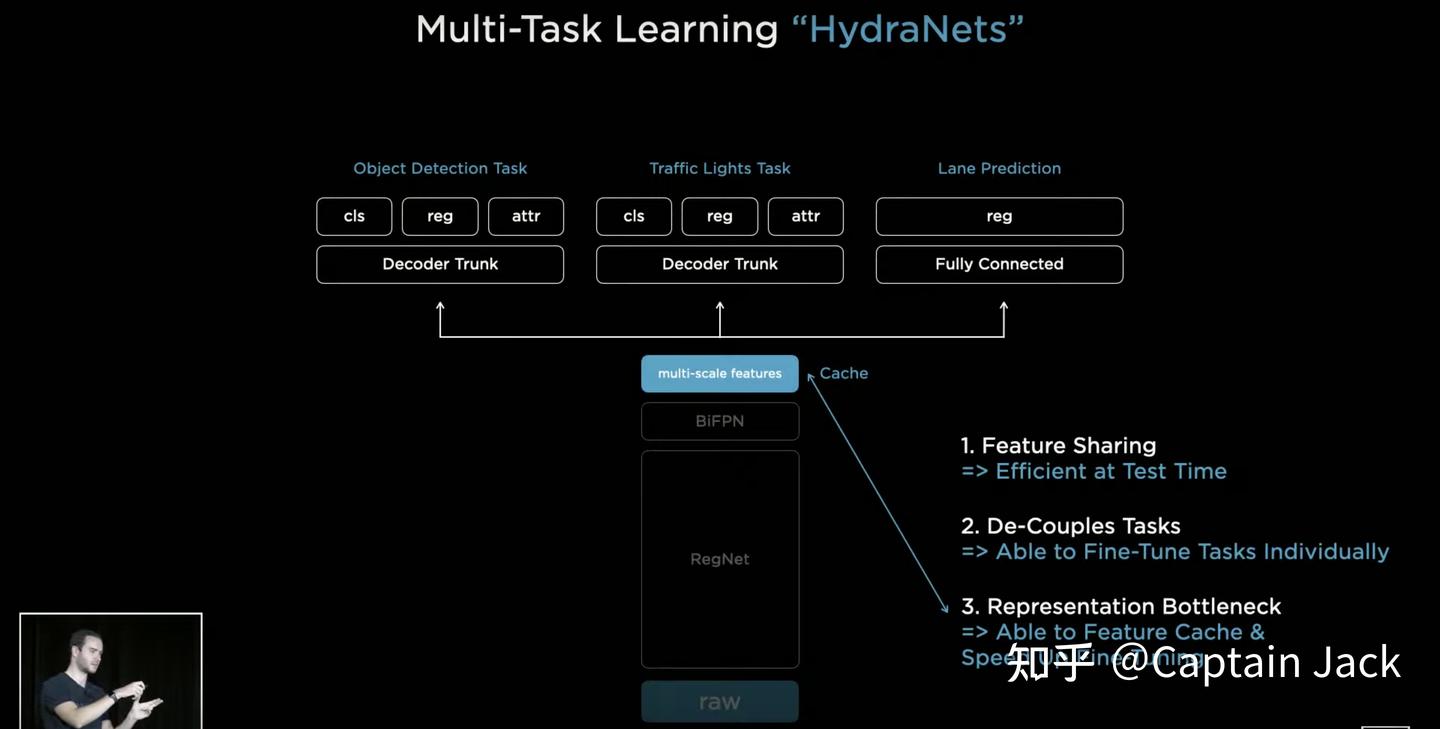
提了一个 feature sharing,infer 的时候省算力,训练的时候可以直接用这些保存下来的feature 训练 head, 一样可以省算力,各分任务也可以隔离开,并行发布版本。
这些也算是常规做法,尤其是在 infer 的时候用一个共享的 backbone。
训练中,等效 backbone 锁死。实际开发中应该会有一组人员负责 backbone 的提升,定期升级版本。每次升 backbone 都会有对下游的连锁效应,不过 slides 里面也说了,可以用 cached feature 来 fine-tune 下游部分。这样可以并行化训练下游的各项子任务,而且会很快(反正 Tesla 也不缺算力)。
backbone 评估一般可以用一个类似 Imagenet 的分类任务数据集,但是在实际业务中,backbone 的评估是需要具体确定一个业务相关的指标来决定是否有提升。
在具体任务这块,我好奇的是 Lane 直接用的 fc 来回归,这个具体怎么做没说。
3 重点
重点来了,实际上就是两点:
- 多相机融合(毕竟 Tesla 只用相机,但是这里面的思路扩展到多传感器融合上也行)
- 时序融合
内容比较多,分开两块了。
3.1 Singe Cam is not Enought(多相机融合)
Problems :
Problem 0 - Occupancy Tracker
用了一个路面边缘 or freespace 来做举例,用单目预测结果后再重新投影到物理世界里面。问题是:
- Across-camera Fusion and tracker are difficult to write.
- Image space is not output space
别说相机间的 tracker 写起来有问题。单相机内部目标的 tracker 随着要处理各种 case,也会变得一团乱麻。
第二个问题,需要后续的视觉到物理世界的投影。目前单目的测距模型依赖了非常多的先验条件(99%的概率不能完全满足)。造成投影阶段的误差根本没办法控制。
我自己常说的一句话是:”你就当传统单目测距的出来的距离是在放屁。”
Problem 1 - Per-cam detection then fusion(车道线 or 道路结构)
need depth projection for every pixal
依然是上面提到的投影问题,这个演示视频应该用的是IPM投影。明显的两个问题:
- 图像每像素对应的物理空间,随着距离增加会越来越大,也就是解析度会降低。
- 一旦先验条件不满足度增加,整个投影结果都会出现不稳定。
Problem 2 - Per-cam detection then fuse (Detection)
no single camera can see all of the car
在目标检测上,主要问题就是大型目标的关联和融合,类似毫米波雷达的目标分裂。每个相机都只能检测出一部分,在后续的关联和融合上,很难用一个程序逻辑来处理(和上面的freespace一样,difficult to write explicitly)。
Multi-cam fusion :

基本思路还是之前 Andrej 说的,但是补充了不少细节。主要的两个技术:
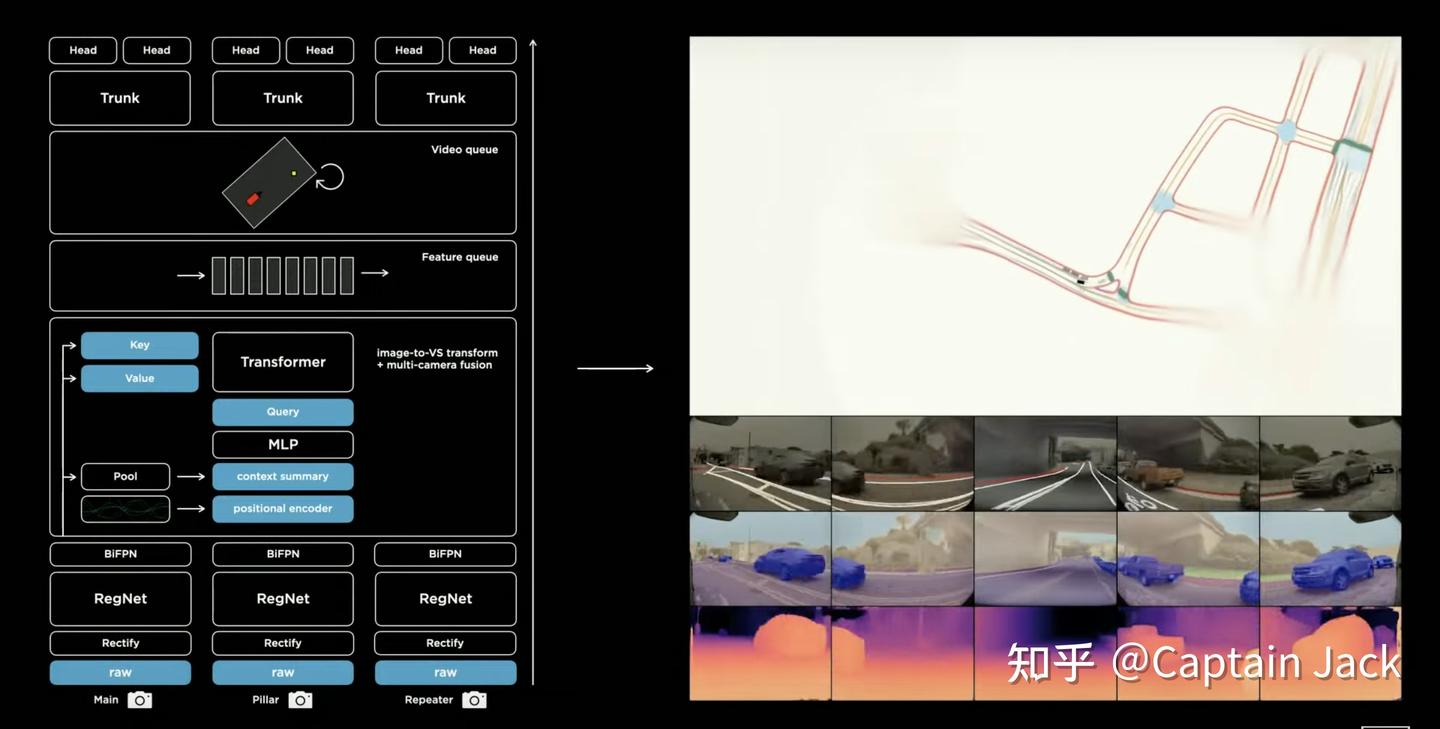
Tech 0 - Learning where to look.(image->BEV + multi-cam fusion)基本流程:
multi-cam, multi-scale features -> Transformer -> BEV
大概的设计思路是:
- Query 代表 BEV 的空间位置的查询,
- 每张图都会有对应的 Key。
- 通过 QK(也就是attention) 来计算两个 space 之间的关系(多相机的图像 vs BEV空间)
- 再将需要的 value 根据 attention 的 score 映射到 BEV空间里面。
具体的BEV的空间位置则通过 positional encoding 来表达,看 slides 上,也会有一个 context summary 来表达全局信息,但是我不确定这个 context summary 是否需要根据不同的 positional encoding 来变化。
Tech 1 - Variations in Camera Calibration(Rectify)这里算是一个我自己可以借鉴的相机前融合思路。
由于通过模型前融合多相机数据,模型内部隐式的学习到了多相机的位置、视角等参数。但是在量产车中,这个多相机的空间关系是不能保证一致性的:每一辆车的相机组成都有一定的误差,如何消除这个关系?
Tesla 这里的做法是通过标定,重新调整所有的车辆的摄像头到一个标准视角上:
Camera Calibration -> virtual common camera
思路就是,先标定好相机,对图像矫正去畸变、变换RT,最终都投射到一个标准的 virtual common camera 的视角上。这样就可以保证,量产车上的所有的摄像头空间关系都和训练时的视角、畸变一模一样。
在视频里面 Andrej 也举了个例子, Rectify 之前,将不同车辆相同相机的图像叠加后,会有模糊(因为每个相机都有一定的角度差异),但是在 Rectify 之后再进行,那么视角里面的后视镜的边缘就非常清晰(说明每张图都成功对齐了)。
Detection: Single Cam -> Multi Cam
这里举例说明多相机融合的优势:
- 目标(尤其是跨相机的大目标)的识别更加稳定
- 相机边缘位置的目标可以更平滑的识别
3.2 Memory (时序融合)
开始第二点,时序融合。为什么要做这个就不多啰嗦了,实际做过 AD 感知的都知道纯粹的单帧结果没有任何意义。很多状态无法识别,比如:
- 速度
- 方向灯状态
- 目标的遮挡与重现
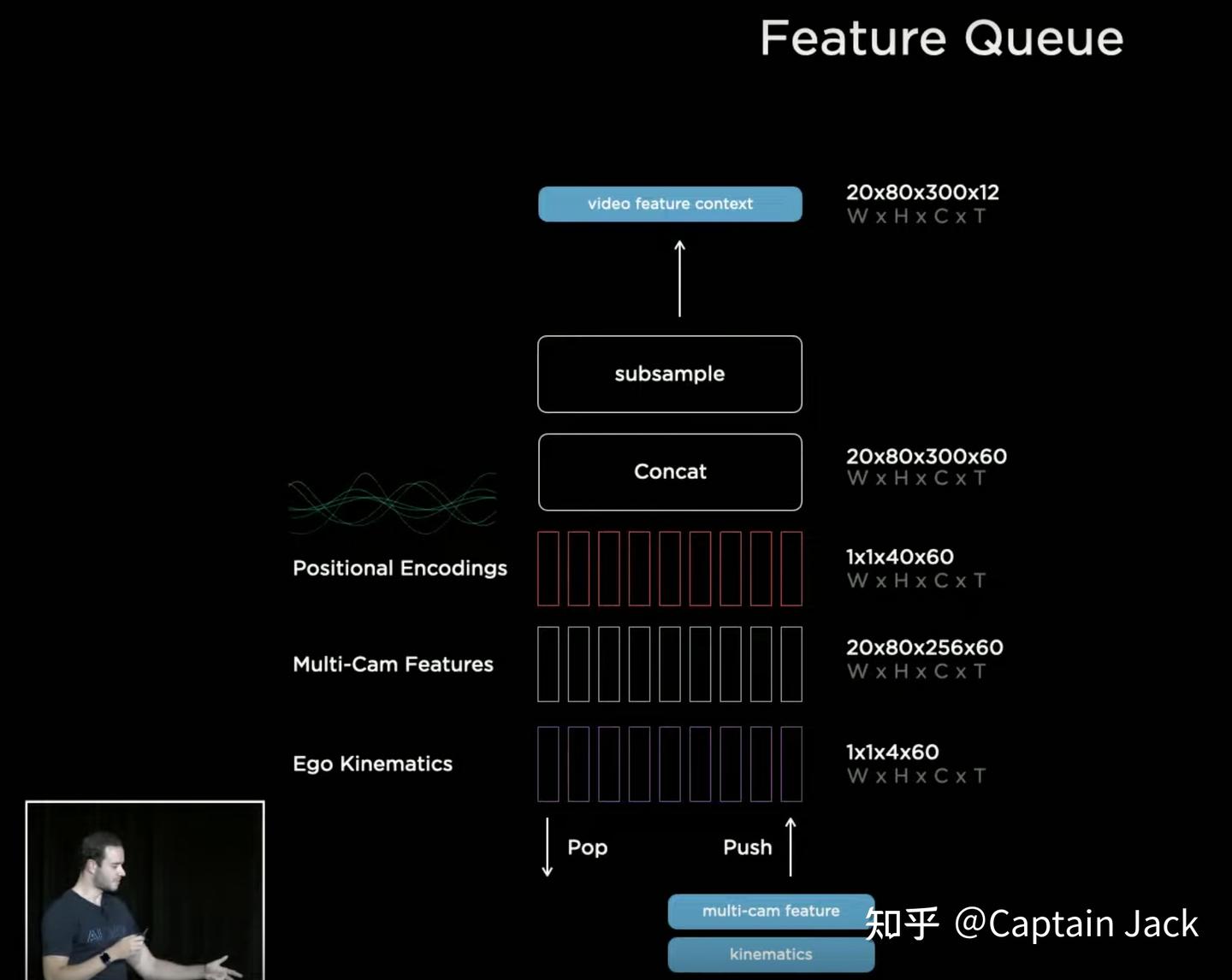
Andrej 给这个模块起的名字是 Video Module:
Feature Queue + Kinematics(IMU) 60-step history
- Sequence sample时序融合的第一个问题就是:采样周期如何确定。
对摄像头来说,天然的就是每帧采样。但是带来的问题是,不同速度下的每帧采样,两帧间的空间差异是不一样的,多帧的图像模型很难适应这种变化。我自己之前一直坚持用轮速仪器来等距离采集,起码在图像的空间关系上保持了一致性。
不过 Tesla 作为一个成年人,用了很简单的方法:全都要。
Time-based: 27ms 周期
Space-based 1 m 周期
-
融合模块3d conv/Transformer/RNN 都试了,RNN的效率最高。重点介绍的是 Spatial RNN,可能因为这个看起来比较炫目。
-
Spatial RNN (map)
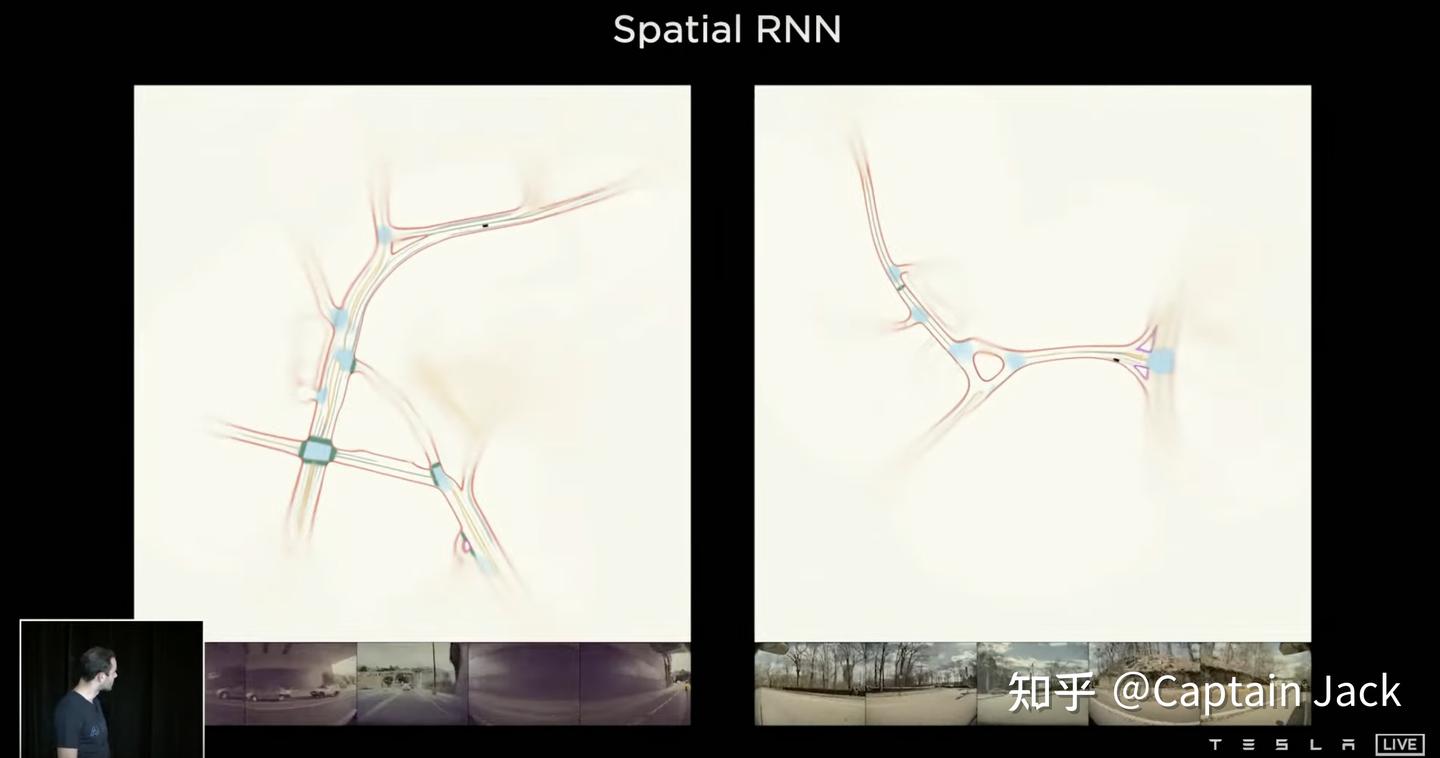
- 先建立一个 BEV 的大图,譬如 1000x1000,车辆的感知范围可能是 30x40。
- BEV 视角下的每一个像素点(or pillar,如果搞激光的话)都用一个 RNN 来维持状态。
- 只要感知范围覆盖了,就用对应特征跑一步RNN。
在我看来,算是一种结合动静态目标的地图。一旦感知可以看到地图上的位置,就开始更新对应点上的特征。不过这里没有具体说明,随着车辆运行空间增加,如何处理新旧的空间的加入和丢弃策略。最粗暴的可以只存车辆周边 NxN 的格子状态。
Andrej 本身也提了,这个可以通过车队来组类似 HD map 的东西,或者我们就叫他 abstract feature map 吧。
- 时序融合优点展示
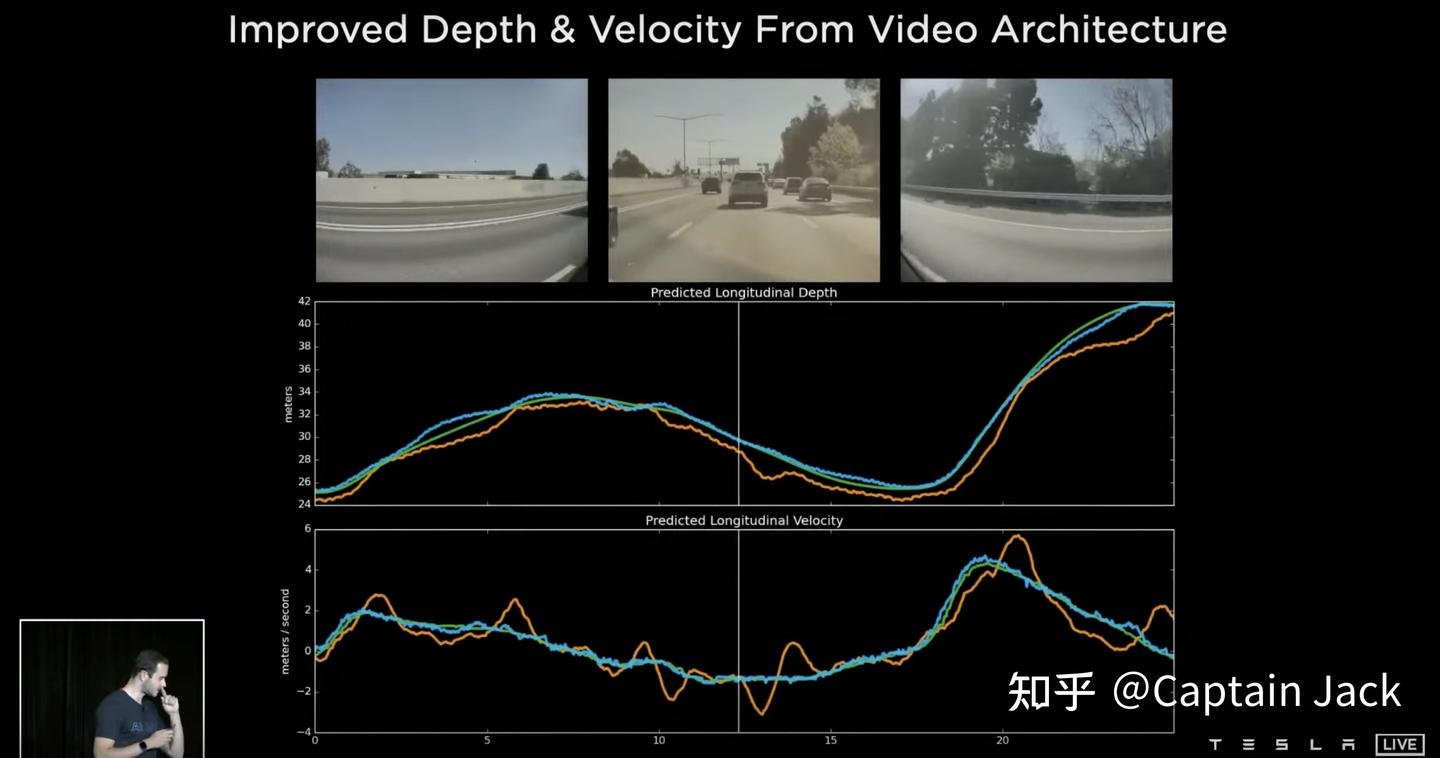
- 对于临时遮挡目标有了记忆能力、
- Velocity/Depth 的预测基本做到 Radar 级别,尤其是对速度的估计,比单帧效果稳定了很多(这个结论也合正常逻辑)
4 总结
Andrej 说了下他们可能的工作方向:
Fusion of space & time is late in network. Can do earlier fusion. Output is dense rasters. Predict sparse structure of the road (point by point).