规划模型的PoC及难点
我让 GPT-4 帮我润色了下,省略了很多废话,顺便让他给了一份中英文的总结,简直就是6。
GPT-4的总结
中文
最近一个月,我们进行了一系列概念验证,与规控团队讨论并形成了初步的设计方向,目标是方便地融入现有框架。开放环路测试结果显示,模型在不同时机的选择上存在差异。评测存在一定难度,可靠的评测方法只能依赖闭环评测。模拟器在实现更贴近实际的模拟方面面临诸多挑战。我们引入了低级指令(LLI)概念,以建模规划路径中的模糊区间。未来,我们将引入占用网络、红绿灯与标识等信号,以及新版本的感知模型。
英文
Over the past month, we have been conducting a series of Proof of Concept (PoC) validations and discussing preliminary design directions with the planning & control team. The goal is to seamlessly integrate these designs into the existing framework. The open-loop test results demonstrate differences in the model’s decision-making at different moments. Evaluating the model poses certain challenges, with reliable evaluations relying on closed-loop testing. Simulators face numerous obstacles in achieving more realistic simulations. We introduced the concept of Low-Level Instructions (LLI) to model the ambiguity in planning paths. In the future, we plan to incorporate signals such as occupancy, traffic lights, and signage, as well as a new version of the perception model.
目前验证模型的情况
接上篇
Captain Jack:NO-HDMap 传统归控方案面对的问题的工作内容,最近一个月,我们在进行一些概念验证,并与规控团队讨论形成了一些初步的设计方向。我们的目标是使这些设计方便地融入现有框架。
在验证集合上的开放环路(open loop)测试表现出了一些有趣的结果:
模型在不同时机的选择上存在差异:
- 与白色的GT相比,模型在路口转向时似乎更为激进。
- 在后续几秒内,当车辆即将越过黄色障碍物时,路径会突然改变,绕过前方障碍物
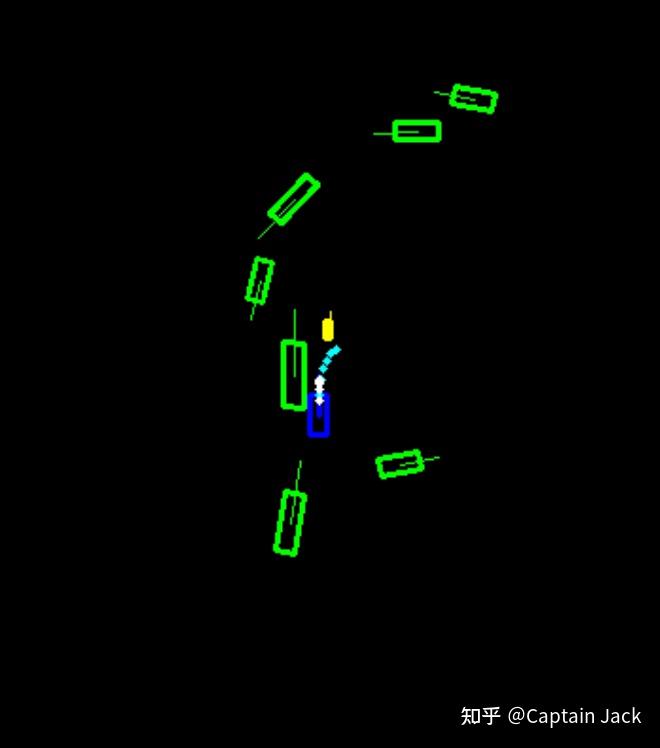
通过调整目标位置和LLI(低级指令,后续将简要解释)可以直接影响路径规划
Lily_x 是传递给模型的一部分LLI
https://www.zhihu.com/video/1628903715573862401
目前面临的一些难点
评测难度
物理世界的时空一致性难以保证。传统机器学习的评测集方法仅能作为开放环路测试,无法确保自车与环境元素之间的交互。评测结果缺乏说服力。
可靠的评估方法只能是闭环(close loop)评测,这需要进行实车测试或接入模拟器。实车测试的问题在于缺乏可复现性,成本高。如果成本低,尚可通过数量来缓解复现性问题,少量数据最后会变成针对具体的case,这和统计模型解决概率问题是互相冲突的。
而在模拟器中的评测,难点主要来自于两方面:1. 多智能体交互问题;2. 如何实现更贴近实际的模拟。贴近实际,需要对感知端的结果有比较全面的评测,这样才能在模拟器中根据感知评测的结果进行模拟,包括:误检、漏检、距离误差、FoV遮挡等等。否则,基于完美感知的评测一样没有说服力。
模拟器难点
障碍物可以依靠评测结果模拟误检和误差等概率问题,但静态元素的模拟较为困难。如果使用高精地图(HD),则相对容易进入模拟器。否则,在感知结果模拟上存在很大难度。
对于模拟器,需要考虑是否模拟原始传感器的输入。相对而言,激光雷达的点云数据更容易实现模拟,特别是在厂商能配合模拟一些硬件特性的情况下。与图像相比,更容易贴近现实世界,但相机传感器模拟的难度较大。
为了复现某些案例,模拟器需要具备环境重建能力,无论是通过传感器结果还是感知后的结果。然而,这些工作已经不再属于传统模拟器的部分。
模糊区间的建模:LLI(Low-Level Instruction)
由于规划路径存在较大模糊区间,需要一个因素来建模这种条件概率。为了考虑这个因素,当前模型引入了低级指令(LLI)的概念。
LLI主要融合两个因素:
- 中长期目标
- 隐式的规划模糊表达
通过这两个因素,我们可以对预测的航点产生一定影响。从目前的分析来看,这有一定的能力来控制规划的激进程度。
未来会引入的信号
- Occupancy,公司内部已经有现成的模型,但由于数据问题,接入这个信号会有很多麻烦。
- 红绿灯与标识。
- 新版本的感知模型,目前阶段的数据仍使用老版本感知结果,看起来融合关联上存在很多问题。